موتور براشلس مدل MT2204 KV2300 راستگرد مناسب برای مولتی روتورهای کوچک (FPV)
MT2204 KV2300 Brushless Motor CW


موتور براشلس مدل MT2204 KV2300 راستگرد مناسب برای مولتی روتورهای کوچک (FPV)
MT2204 KV2300 Brushless Motor CW
- برند : متفرقه ساخت چین
- دستهبندی : قطعات رباتیک
- مدل : MT2204 KV2300 CW
- طول : 32.2 میلیمتر
- سایر ویژگی ها : قطر: 27.9 میلیمتر
- سایر ویژگی ها : راستگرد
- سایر ویژگی ها : اسپید کنترل مناسب: 20 تا 25 آمپر
- سایر ویژگی ها : باتری مناسب: Lipo 2S , 3S
- سایر ویژگی ها : ملخ مناسب: 5 الی 6 اینچ
- سایر ویژگی ها : فریم: 12N14P
شناسه محصول: 72764
نقد و بررسی موتور براشلس مدل MT2204 KV2300 راستگرد مناسب برای مولتی روتورهای کوچک (FPV)
موتور براشلس در واقع یک موتور سنکرون است که با کمک انرژی الکتریکی کار میکند، این نوع موتور فاقد جاروبک بوده که این ویژگی باعث افزایش طول عمر و راندمان بالای موتور میشود. در موتورهای براشلس Outrunner هسته موتور(سیم پیچ) ثابت بوده و پوسته که آهنرباهای دائمی به آن متصل اند دوران دارد.
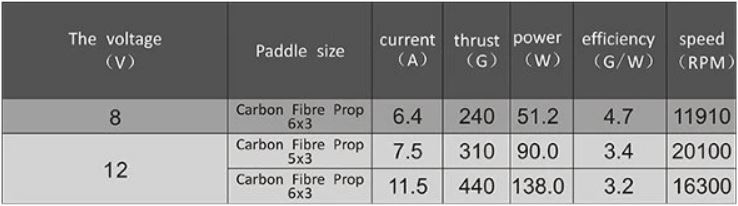
موتور MT2204 KV2300 دارای رزوه شفت راستگرد مناسب برای کاربری برای ملخ راستگرد ربات های پروازی است، این موتور از نوع Outrunner بوده که دارای بیشینه تراست 440 گرم میباشد. به دلیل میزان تراست مناسب و KV بالای این موتور گزینهی بسیار مناسبی برای استفاده در ساخت کواد روتورهای FPV است. ملخ مناسب برای این موتور سایز 5 الی 6 اینچ می باشد.
باتری مناسب 2S و 3S لیتیوم پلیمر
مشخصات محصول
| مدل | MT2204 KV2300 CW |
| طول | 32.2 میلیمتر |
| سایر ویژگی ها | قطر: 27.9 میلیمتر |
| سایر ویژگی ها | راستگرد |
| سایر ویژگی ها | اسپید کنترل مناسب: 20 تا 25 آمپر |
| سایر ویژگی ها | باتری مناسب: Lipo 2S , 3S |
| سایر ویژگی ها | ملخ مناسب: 5 الی 6 اینچ |
| سایر ویژگی ها | فریم: 12N14P |
| KV (RPM/ولت) | 2300 |
| تراست استاتیک (گرم) | 440 |
دیدگاه کاربران
تا کنون دیدگاهی برای این محصول ثبت نشده است . شما می توانید با ثبت نظر، تجربه خود در خرید یا استفاده از این محصول را با دیگران به اشتراک بگذارید.
.
آکادمی پارتینه
در رابطه با این محصول، مطالب یا فایلهای زیر در آکادمی پارتینه منتشر شدهاند. برای کسب اطلاعات بیشتر میتوانید این مطالب را مطالعه نمایید.
موتور براشلس مدل MT2204 KV2300 راستگرد مناسب برای مولتی روتورهای کوچک (FPV)



